Pytorch 入门(1)
前言
学习 Pytorch 官方的 Learn the Basics。
Pytorch 2.x
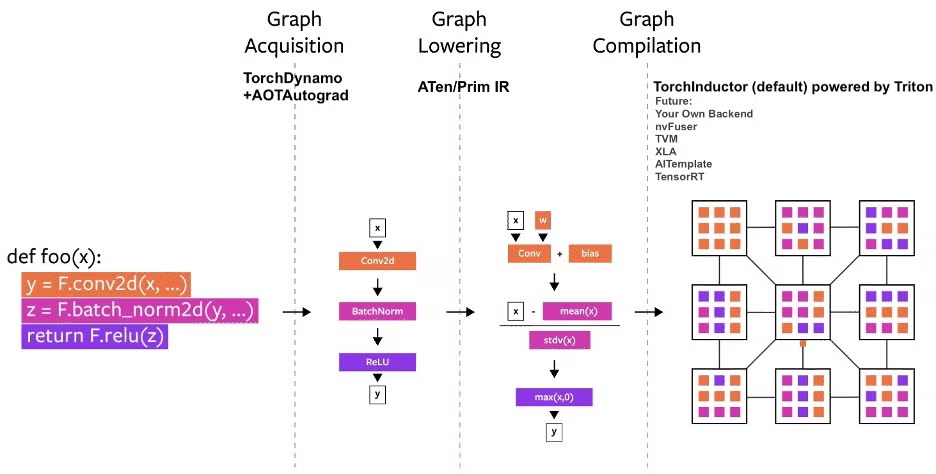
相比于 Pytorch 1.x,Pytorch 2.x 增加了 torch.compile 功能,因此它完全兼容于上个版本的 Pytorch。torch.compile的新技术是 TorchDynamo、AOTAutograd、PrimTorch和TorchInductor。
TorchDynamo可靠且快速地获取图。通过使用 Frame Evaluation API 安全地捕获PyTorch程序AOTAutograd复用Autograd进行即时图计算,以加快训练过程的反向传播环节PrimTorch将2000多个PyTorch算子规范化为约250个基本算子的封闭集,开发者可以针对这些算子构建完整的PyTorch后端。这大大降低了编写PyTorch功能或后端的门槛。TorchInductor是一个深度学习编译器,为多个加速器和后端生成快速代码。为 GPU 生成 Triton代码,为 CPU 生成 C++/OpenMP 代码
Pytorch 2.x 最显著的特点就是在编译模式下取得优秀的模型加速效果。下面是个简单上手例子:
compiled_model = torch.compile(model)模型会在第一轮训练时进行编译,所以首轮速度会比之后的训练速度慢一些。torch.compile 的可选参数 mode 有三个选项:
default针对大型模型优化,编译时间低,不额外占用内存reduce-overhead针对小模型优化,占用额外内存max-autotune优化以产生最快的模型,但编译时间非常长
代码在启用编译后在 debug 上会变得困难。这可能不是用户代码的问题,可以用 Minifier 工具生成 Minifier 代码 ,并向官方反馈。如果编译模式下的加速不理想,使用 torch._dynamo.explain 工具检查哪处代码出现 graph break,它会阻碍编译器工作。
Distributed(未完待续)
其他项目
vLLM用于大语言模型的加速推理和减少模型占用,由加利福尼亚大学捐赠给 Linux 基金会。
DeepSpeed用于简化模型并行训练的部署过程,由微软捐赠给 Linux 基金会。
神经网络基础
人工神经网络(Artificial Neural Network,ANN)简称神经网络(NN),是一种模仿生物神经网络结构和功能的计算模型。大多数情况下人工神经网络能在外界信息的基础上改变内部结构,是一种自适应系统,通俗地讲就是具备学习功能。
人工神经网络中的神经元,可以对多个输入进行加权求和,再经过特定的“激活函数”转换后输出。
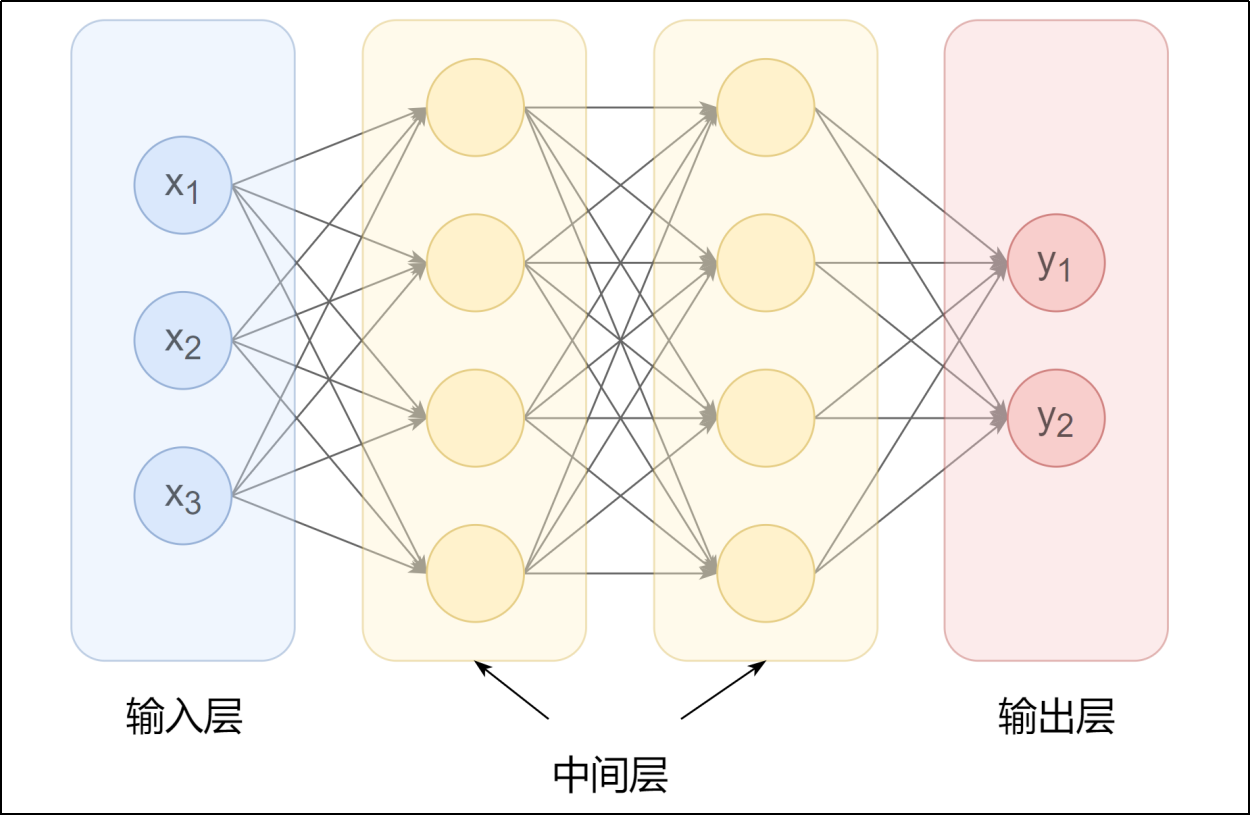
- 使用多个神经元就可以构建多层神经网络,最左边的一列神经元都表示输入,称为输入层;最右边一列表示网络的输出,称为输出层;输入层与输出层之间的层统称为中间层(隐藏层)。
- 图中下一层每个神经元都与上一层所有神经元连接,称为全连接,每个连接都会有一个权重。权重越大,对应信号的重要性越高。偏置则可以用来控制神经元被激活的容易程度。
- 神经元中的信息逐层传递(称为前向传播),上一层神经元的输出作为下一层神经元的输入。
激活函数
安装
本地安装。目前稳定版最新的是 Pytorch 2.8,要求 Python 版本3.9及以上。
# 安装 pip
sudo apt install python3-pip
# CPU
pip3 install torch torchvision --index-url https://download.pytorch.org/whl/cpuLearn the Basics
有其他深度学习框架学习经验的人可以直接跳到 0. Quickstart。
1. Tensors
创建张量的方式有:
- 数组创建。如
torch.tensor(data) - numpy 数组创建。如
torch.from_numpy(np_array) - 由旧张量创建新张量,新张量保留旧张量的形状、数据类型,除非覆盖。如
torch.rand_like(x_data, dtype=torch.float) - 用形状(如
shape = (2, 3))创建,如torch.rand(shape)
其中由 numpy 数组创建的张量与 numpy 数组共享同一块内存,是同一块内存的不同视图;与普通数组不共享内存。
张量的属性有:
- shape 形状
- dtype 数据类型
- device 设备,表示张量是在 cpu 还是 gpu 上计算
拼接张量的方式有 torch.cat 和 torch.stack 。
单元素张量转换为 Python 数值,用 tensor.item() 。
张量乘法,其中 tensor.T 是 tensor 的转置,y1 等于 y2 等于 y3:
# 1. @
y1 = tensor @ tensor.T
# 2. tensor.matual
y2 = tensor.matual(tensor.T)
# 3. torch.matual
y3 = torch.rand_like(y1)
torch.matual(tensor, tensor.T, out=y3)张量逐元素乘法,z1 等于 z2 等于 z3 :
# 1. *
z1 = tensor * tensor
# 2. tensor.mul
z2 = tensor.mul(tensor)
# 3. torch.mul
z3 = torch.rand_like(z1)
torch.mul(tensor, tensor, out=z3)2. Datasets & Dataloaders
torch.utils.data.Dataset 和 torch.utils.data.Dataloader 用于将数据集代码和模型训练代码解耦合。Dataset 存储样本及其对应的标签,Dataloader 将可迭代的对象包装在 Dataset 周围,以实现轻松访问样本。
使用 Dataset 自定义数据集:
# decode_image 将图片转换为张量
from torchvision.io import decode_image
class CustomImageDataset(Dataset):
def __init__(self, annotations_file, img_dir, transform=None, target_transform=None):
self.img_labels = pd.read_csv(annotations_file)
self.img_dir = img_dir
self.transform = transform
self.target_transform = target_transform
# 返回数据集中的样本数量。
def __len__(self):
return len(self.img_labels)
# 根据 idx,返回该位置的(图片张量,标签)
def __getitem__(self, idx):
img_path = os.path.join(self.img_dir, self.img_labels.iloc[idx, 0])
image = decode_image(img_path)
label = self.img_labels.iloc[idx, 1]
if self.transform:
image = self.transform(image)
if self.target_transform:
label = self.target_transform(label)
return image, labelDataloder 是一个迭代器。使用 Dataloader 实现:小批量(minibatch) 训练、每个 epoch 打乱数据集(抑制过拟合)、Python 多进程(加快数据读取)。
train_dataloader = DataLoader(training_data, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)
train_features, train_labels = next(iter(train_dataloader))进一步阅读:torch.utils.data API
3. Tranformers
图像数据集往往不能开箱即用,需要用 torchvision.transforms 对数据进行一些操作,使其适合训练。torchvision.datasets 提供的数据集有两个通用参数,用于修改特征的 transform 和用于修改标签的 target_transform。
Fashion MNIST 的特征以 PIL 图像格式存在,标签是整数。为了训练,我们需要将特征转换为归一化的张量,将标签转换为 one-hot 编码的张量。为了进行这些转换,我们使用了 ToTensor 和 Lambda。
from torchvision.transforms import ToTensor, Lambda
ds = datasets.FashionMNIST(
root="data",
train=True,
download=True,
transform=ToTensor(),
target_transform=Lambda(lambda y: torch.zeros(10, dtype=torch.float).scatter_(0, torch.tensor(y), value=1))
)ToTensor将 PIL 图像或 NumPy 数组转换为 FloatTensor,并将图像的像素值缩放到[0., 1.]范围内scatter_(dim, index, value)的作用是:在指定的维度dim上,按照index指定的位置,填入value值
进一步阅读:torchvision.transforms APl
4. Build Model
torch.nn 命名空间提供了构建自己的神经网络所需的所有构建块。PyTorch中的每个网络模块都是 nn.Module 的子类。
# 确定训练所用的加速设备
device = torch.accelerator.current_accelerator().type if torch.accelerator.is_available() else "cpu"
print(f"Using {device} device")
class NeuralNetwork(nn.Module):
def __init__(self):
super().__init__()
self.flatten = nn.Flatten()
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 512),
nn.ReLU(),
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10),
)
def forward(self, x):
x = self.flatten(x)
logits = self.linear_relu_stack(x)
return logits
# 实例化神经网络,并将示例转移到加速设备上
model = NeuralNetwork().to(device)nn.Flatten有两个重要参数:start_dim 表示从哪个维度开始展平(默认=1,0 是minibatch所在的维度), end_dim 表示展平到哪个维度(默认=-1,即最后一个维度)。nn.Flatten主要作用是将输入展平(flatten)成一维或二维张量nn.Linear使用其存储的权重和偏置对输入应用线性变换nn.Relu是激活函数中的一种,帮助网络学习各种现象nn.Sequential是一个按顺序排列的模块容器,数据将按照定义的顺序通过所有模块nn.Softmax会将输入张量第dim维度上的值缩放到0和1之间,代表模型对每个类别的预测概率。dim维度上的所有值之和为1
注意,像 nn.Linear、nn.Relu 这种的,它们不是函数而是 Python 的模块。
测试网络:初始化一个随机的张量 x
X = torch.rand(1, 28, 28, device=device)
logits = model(X)
pred_probab = nn.Softmax(dim=1)(logits)
y_pred = pred_probab.argmax(1)
print(f"Predicted class: {y_pred}")查看模型参数:使用模型的 parameters() 或 named_parameters() 方法。
for name, param in model.named_parameters():
print(f"Layer: {name} | Size: {param.size()} | Values : {param[:2]} \n")进一步阅读:torch.nn API
5. Autograd
训练网络过程中常常用到反向传播,反向传播会根据损失函数的梯度对网络的权重进行调整。而 torch.autograd 用于自动求梯度。自动求梯度要求张量的 requires_grad 属性设置为 true,可以在创建张量时设置,也可以用张量的方法 tensor.requires_grad_(True) 。
出于性能考虑,在一张给定的计算图上进行反向传播的次数是一次,除非在调用 backward() 传递参数 retain_graph=True 。
# 反向传播
loss.backward()
# 查看梯度
print(w.grad)
print(b.grad)出于冻结参数、进行测试等目的,有时需要停止对张量的梯度跟踪计算。
- 使用
torch.no_grad()代码块,在代码块下的所有张量不进行梯度计算 - 使用张量的
detach方法,比如z_det = z.detach()中z_det不计算梯度
前文提到“对给定的计算图只进行一次反向传播”,是因为每次执行 backward() 都会重新建立一张新的计算图,这样做的好处是可以在模型训练过程中添加控制流语句。
Pytorch 的计算图是一张有向无环图(DAG),输入是叶子结点,输出也就是损失函数,是根结点。在正向传播过程中,autograd 会运行请求的操作以计算结果张量,并维护 DAG 中每次操作的 grad_fn 。在反向传播过程中,autograd 会根据每个 grad_fn 计算梯度,并将得到的梯度累加到张量的 grad 属性上。
“梯度累计”会引起一些问题,比如下一个 epoch 会用到上一个 epoch 的梯度,每个 epoch 应该是独立的。tensor.grad.zero_() 会清空张量的梯度,实际训练过程中由优化器负责清空张量的 grad,如 optimizer.zero_grad()。
进一步阅读:Autograd Mechanics
6. Optimiztion
超参数是用于控制模型优化过程的可调整的参数,比如 epochs、batch_size、learning_rate。超参数的微调可以借助 ray tune 工具。
设置数据、网络、超参数后,就可以开始训练和优化模型了。优化循环的每次迭代就是 epoch,每个 epoch 又包含一个训练循环和一个测试/验证循环。训练循环尝试收敛到最优参数,测试/验证循环在测试集上迭代,用来验证每个 epoch 后模型的表现是否改善。
损失函数用来衡量预测结果和实际结果之间的不相似度,优化的目的是让损失函数的值越来越小,模型在测试集上的表现越来越好。
常见的损失函数有用于回归任务的 nn.MSELoss (Mean Square Error)、用于分类任务的 nn.NLLLoss (Negative Log Likelihood)、综合了 nn.LogSoftmax 和 nn.NLLLoss 的 nn.CrossEntropyLoss 。
优化器是调整模型参数以在每个训练步骤中减少模型错误的过程。优化算法定义了这一过程是如何执行的。
# 用到的优化算法是 Stochastic Gradient Descent
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)优化器的工作流程是上个 epoch 梯度清零 optimier.zero_grad()、进行反向传播 loss.backward()、根据反向传播得到的梯度对参数进行调整 optimier.step()。
def train_loop(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset)
# Set the model to training mode - important for batch normalization and dropout layers
# Unnecessary in this situation but added for best practices
model.train()
for batch, (X, y) in enumerate(dataloader):
X, y = X.to(device), y.to(device)
# Compute prediction and loss
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
loss.backward()
optimizer.step()
optimizer.zero_grad()
if batch % 100 == 0:
loss, current = loss.item(), batch * batch_size + len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
def test_loop(dataloader, model, loss_fn):
# Set the model to evaluation mode - important for batch normalization and dropout layers
# Unnecessary in this situation but added for best practices
model.eval()
size = len(dataloader.dataset)
num_batches = len(dataloader)
test_loss, correct = 0, 0
# Evaluating the model with torch.no_grad() ensures that no gradients are computed during test mode
# also serves to reduce unnecessary gradient computations and memory usage for tensors with requires_grad=True
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model(X)
test_loss += loss_fn(pred, y).item()
# type(torch.float) 将 True 转换为 1.,False 转换为 0.
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")开始训练:
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
epochs = 10
for t in range(epochs):
print(f"Epoch {t+1}\n-------------------------------")
train_loop(train_dataloader, model, loss_fn, optimizer)
test_loop(test_dataloader, model, loss_fn)
print("Done!")进一步阅读:Loss Functions、torch.optim
模型热身
加载已训练模型的部分参数,能够有效的加快我们自己的待训练模型的训练速度。但是已训练模型的参数往往不能直接拿来用,参数往往不能匹配,比如这里多一点、那里少一点参数。
如果模型A和模型B的网络结构相同,但某些键不匹配,此时将参数 strict 设置为 False:
# Specify a path to save to
PATH = "model.pt"
torch.save(netA.state_dict(), PATH)
# 将模型A的参数加载到模型B
netB.load_state_dict(torch.load(PATH, weights_only=True), strict=False)7. save & load model
state_dict 是保存 Pytorch 已训练模型参数的内部静态字典。要加载模型权重,首先需要创建相同模型的实例,然后使用load_state_dict()方法加载参数。
# 保存模型
torch.save(model.state_dict(), 'model_weights.pth')
print("Saved PyTorch Model State to model.pth")
# 实例化 model
# 加载模型
model_state_dict = torch.load('model_weights.pth', weights_only=True)
model.load_state_dict(model_state_dict)保存模型时可以把网络结构和参数一并保存,这样加载模型时就不用实例化模型了。但是不建议这么用。
torch.save(model, 'model.pth')
model = torch.load('model.pth', weights_only=False)Tips for Loading an nn.Module from a Checkpoint提到了一种优化保存和加载模型的方法。下面代码2要比代码1更节省计算和内存开销,代码2要求 Pytorch 2.1 及以上。
# 代码1
state_dict = torch.load('checkpoint.pth', weights_only=True)
m = SomeModule(1000)
m.load_state_dict(state_dict)
# 代码2
state_dict = torch.load('checkpoint.pth', mmap=True, weights_only=True)
with torch.device('meta'):
meta_m = SomeModule(1000)
meta_m.load_state_dict(state_dict, assign=True)torch.load(mmap=True)把参数加载到虚拟内存(而不是物理内存),让操作系统自动处理加载和卸载到物理内存。此外,mmap=True不需要等待参数加载完成,就可以进行逐张量处理( per-tensor processing)m = SomeModule(1000)为所有参数/缓冲区分配内存,并按照在SomeModule.__init__()中定义的默认初始化方案进行初始化,而load_state_dict会再次分配一遍内存,造成了浪费。在torch.device('meta')上的张量不携带数据,但携带的所有其他元数据- 当张量在设备
meta上时,load_state_dict需要设置assign=True,且优化器需要在load_state_dict后面初始化[1]
进一步阅读:Saving and Loading Models
因为优化器持有
nn.Module.parameters()的引用,如果传递了assign=True,那么必须在从状态字典加载模块之后初始化优化器。 ↩︎